

Az ígéretes fejlesztéssel a Pécsi Tudományegyetem szombaton tartott, egész napos nyílt napján ismerkedhettek meg az érdeklődők. A Pollack Mihály Műszaki és Informatikai Kar hallgatói által készített szoftver egy kvadkopter kamerájából érkező jeleket alakítja át úgy, hogy a drón automatikusan tudja követni az előre megadott célpontot.
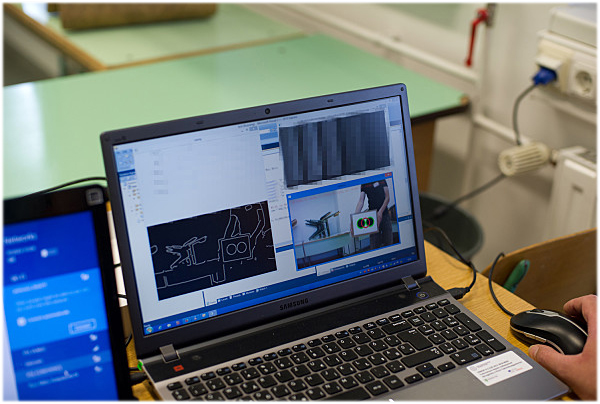
A kísérlet során egy táblára két fekete kört rajzoltak és ezek paramétereit (átmérő, egymástól való távolságuk, stb.) táplálták be az irányításért felelős alkalmazásba. A drón ezek után a két pontot "figyelte" és a tábla egyazon magasságában követte le azok mozgását. Dr. Sári Zoltán adjunktus ugyanakkor elmondta, a kísérlet két fekete lufi esetén már nem működne, mivel a gépezetet irányító program egyelőre csak kontrasztokat lát.
A jövőben azonban ugyanez a szoftver akár arcok felismerésére is képes lehet, azaz egy rendezvény felett köröző drón előre megadott célszemélyeket tud majd megfigyelni. Ez persze még igen távoli, a Kar hallgatói most azon dolgoznak, hogy a szoftver egy fedélzeti számítógépre is telepíthető legyen, a légijármű pedig ezáltal teljes önállóságot kapjon.
/cikk és képek: pecsistop.hu/